Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
В STEP/DIR драйверах используется 3 сигнала:
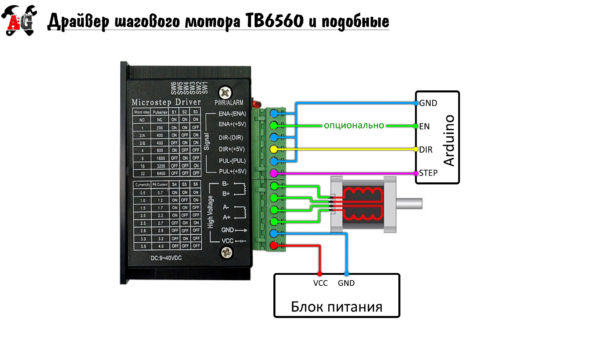
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
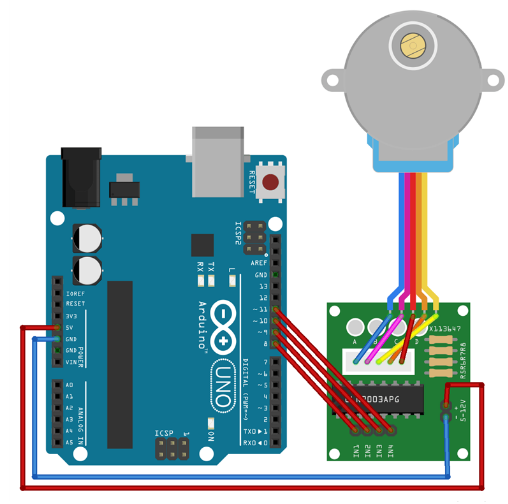
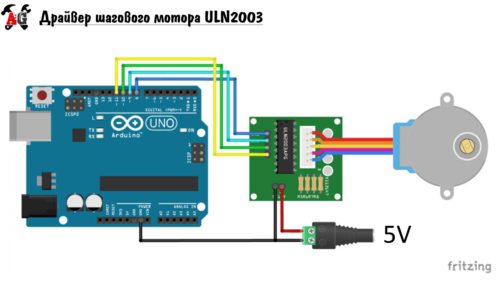
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Библиотека для шагового двигателя Arduino v2.1
ОБНОВЛЕНИЯ
ТЕОРИЯ
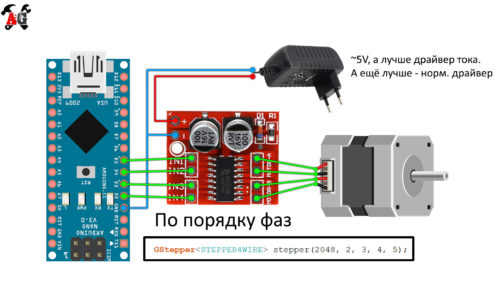
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
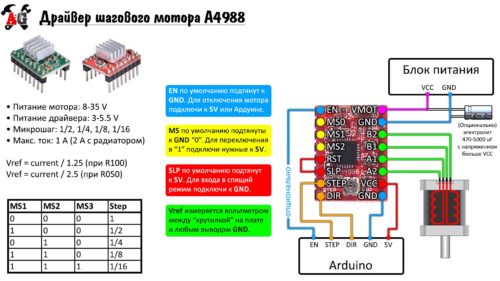
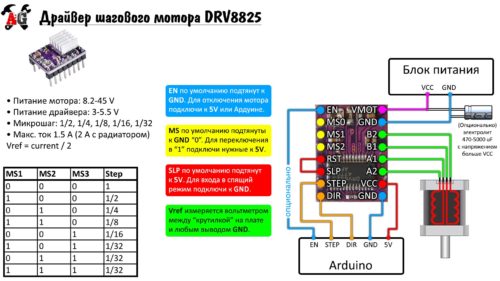
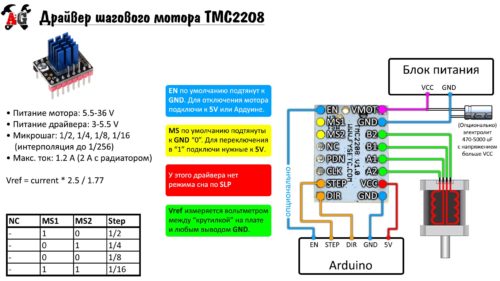
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
БИБЛИОТЕКА
GyverStepper v2.1
Производительная библиотека для управления шаговыми моторами с Arduino
Совместимость
Совместима со всеми Arduino платформами (используются Arduino-функции)
УСТАНОВКА
ДОКУМЕНТАЦИЯ
Аааа почему так много всего?!
Библиотека содержит набор инструментов для разных сценариев работы с шаговыми моторами
Инициализация
Время шага [NEW!]
Медленные скорости (new!)
Тик и тайминги
Смена направления
Режимы работы
Режим FOLLOW_POS
Режим KEEP_SPEED
Алгоритм планировщика скорости
Остановка и сброс
Управление питанием
GStepper2, GPlanner и GPlanner2 являются нововведениями в библиотеке и работают чуть иначе, больше ориентированы на движение от точки к точке.
Тикер
Режим постоянной скорости
Режим движения к позиции
При помощи setMaxSpeed() / setMaxSpeedDeg() задаётся максимальная скорость, которой может достигнуть мотор (суммарная квадратичная скорость по осям для GPlanner) во время движения к следующей точке. Эта настройка не имеет отношения к режиму вращения.
Для старта движения к позиции достаточно вызвать setTarget(позиция) / setTargetDeg(позиция) (кроме GPlanner2). После выполнения этой функции можно запросить у getPeriod() время до следующего тика и запустить таймер, если мотор работает в прерывании.
Во время движения к позиции можно остановиться:
GPlanner2 работает чуть иначе, так как содержит буфер траектории. Подробнее о нём читайте ниже
Управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988
Шаговые двигатели – это разновидность двигателей постоянного тока, в которых перемещение ротора происходит небольшими дискретными шагами. В настоящее время шаговые двигатели находят очень широкое применение – начиная от камер наблюдения и заканчивая сложными роботами и механизмами.

Чтобы лучше понять материал данной статьи целесообразно посмотреть статью об управлении шаговым двигателем 28-BYJ48 с помощью Arduino и потенциометра. Однако шаговый двигатель 28-BYJ48 имеет значительно меньший крутящий момент, чем более мощные двигатели такие как, например, NEMA 14, NEMA17.
В данной статье мы рассмотрим управление шаговым двигателем NEMA 17 с помощью платы Arduino и драйвера двигателя A4988. Для управления направлением вращения шагового двигателя мы будем использовать потенциометр. Ранее на нашем сайте мы также рассматривали управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера DRV8825.
Необходимые компоненты
Шаговый двигатель NEMA17
Принцип действия шагового двигателя Nema17 аналогичен работе других шаговых двигателей. Более подробно о принципах работы шаговых двигателей можно прочитать в статье про подключение шагового двигателя к микроконтроллеру AVR.

Шаговый двигатель NEMA 17 имеет плиту размером 1.7 x 1.7 дюйма и он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1.8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на следующем рисунке.

Как вы можете видеть из представленного рисунка, шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17
Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1.8 градуса, соответственно, получаем:
Steps per Revolution = 360/ step angle
360/1.8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17
Также на нашем сайте вы можете посмотреть все проекты, в которых были использованы шаговые двигатели.
Модуль драйвера шагового двигателя A4988
Модуль драйвера шагового двигателя управляет работой шагового двигателя, подавая на него различные фазы питания в необходимые моменты времени.
Модуль драйвера шагового двигателя A4988 предназначен для управления работой шагового двигателя Nema 17 и другими аналогичными биполярными (двухполюсными) шаговыми двигателями. Этот модуль имеет встроенный транслятор (преобразователь), что позволяет ему управлять и скоростью, и направлением вращения шаговых двигателей, используя для этого небольшое число контактов.

Для управления шаговым двигателем Nema 17 нам понадобится всего два контакта модуля A4988 – STEP (для управления шагами) и DIRECTION (для управления направлением вращения двигателя).
Драйвер двигателя A4988 может управлять работой шагового двигателя в 5 различных режимах: полного шага, половины шага, четверти шага, 1/8 шага и 1/16 шага. Вы можете выбрать необходимый вам режим шага используя контакты выбора режима (MS1, MS2 и MS3). На следующем рисунке представлена таблица задействования этих контактов для выбора необходимого режима шага.

Технические характеристики драйвера двигателя A4988:
Различия между драйверами двигателя DRV8825 и A4988
Оба этих драйвера двигателя предназначены для управления шаговым двигателем Nema 17, имеют похожую распиновку и области применения, но они отличаются в количестве микрошагов, рабочем напряжении и т.д. Ниже приведены следующие ключевые отличия этих модулей драйвера двигателя:
Схема проекта
Схема управления шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988 представлена на следующем рисунке.

Поскольку модуль драйвера A4988 имеет встроенный транслятор (преобразователь), поэтому к плате Arduino достаточно подсоединить только его контакты Step и Direction. Контакт Step используется для управления шагами двигателями, а контакт Direction – для управления направлением его вращения. Шаговый двигатель запитывается от источника питания 12V, а модуль A4988 – от платы Arduino. Потенциометр используется для управления направлением вращения двигателя.
Если вы будете поворачивать потенциометр по часовой стрелке, то и шаговый двигатель будет вращаться по часовой стрелке. Если вы будете поворачивать потенциометр против часовой стрелки, то и шаговый двигатель будет вращаться против часовой стрелки. Конденсатор 47 мкФ используется для защиты платы Arduino от выбросов напряжения. Контакты MS1, MS2 и MS3 остаются неподключенными, что означает что драйвер будет функционировать в режиме полного шага.
Внешний вид собранной конструкции проекта показан на следующем рисунке.

Таблица соединений платы Arduino, шагового двигателя Nema 17 и модуля драйвера двигателя A4988 выглядит следующим образом.
| Контакт A4988 | Соединение |
| VMOT | +ve Of Battery |
| GND | -ve of Battery |
| VDD | 5V of Arduino |
| GND | GND of Arduino |
| STP | Pin 3 of Arduino |
| DIR | Pin 2 of Arduino |
| 1A, 1B, 2A, 2B | шаговый двигатель |
Соблюдайте полярность источника питания.
Объяснение программы для Arduino
Полный код программы и видео с демонстрацией работы схемы приведены в конце статьи, здесь же мы кратко рассмотрим основные фрагменты кода.
Первым делом скачайте библиотеку для управления шаговым двигателем по следующей ссылке и добавьте ее в Arduino IDE. После этого подключите заголовочный файл этой библиотеки в программе и укажите число шагов для шагового двигателя NEMA 17 – оно равно 200.
Управление шаговым двигателем с помощью Arduino и потенциометра
Шаговые двигатели с каждым годом приобретают все большую популярность в мире электроники поскольку именно они обеспечивают превосходную точность позиционирования различных механизмов. В этой статье мы рассмотрим подключение одного из самых распространенных шаговых двигателей 28-BYJ48 к плате Arduino при помощи модуля ULN2003 и управление им с помощью потенциометра.

В нашей предыдущей статье про подключение шагового двигателя к плате Arduino мы управляли углом его поворота из она монитора последовательной связи, в этом же проекте мы будем управлять поворотом шагового двигателя вращая ручку потенциометра. Если мы будем вращать ручку потенциометра по часовой стрелке, то и шаговый двигатель будет поворачиваться по часовой стрелке, а если мы ручку потенциометра будем поворачивать против часовой стрелки – то и шаговый двигатель будет вращаться против часовой стрелки.
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
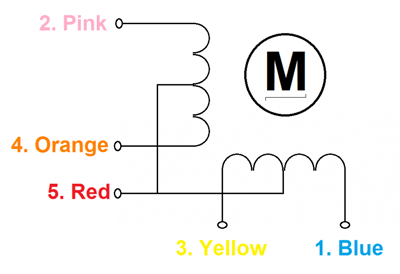 Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
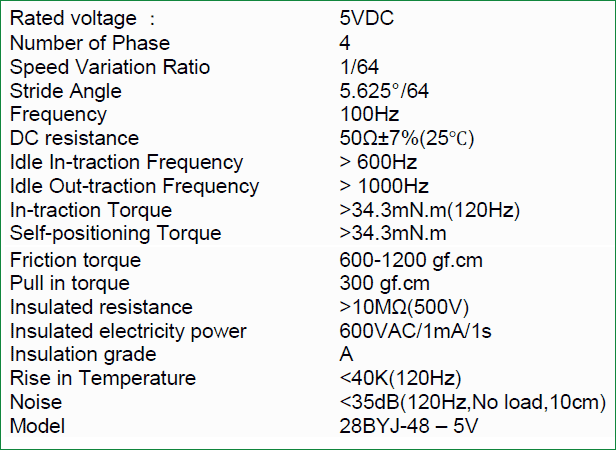
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать.
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Работа схемы
Схема устройства представлена на следующем рисунке.
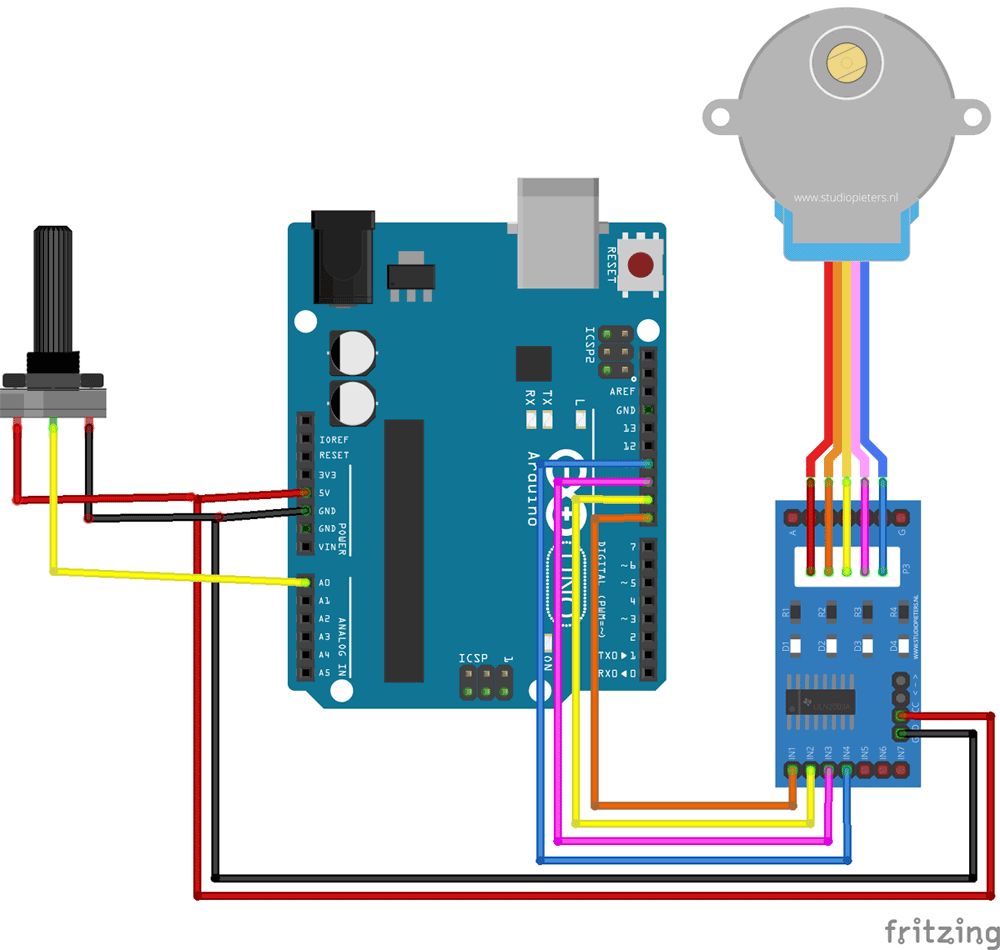 Чтобы подавать питание на соответствующие катушки шагового двигателя мы будем использовать цифровые контакты 8, 9, 10 и 11 платы Arduino, к которым подключены соответствующие контакты драйвера двигателей ULN2003. Потенциометр, с помощью которого мы будем управлять вращением шагового двигателя, подключен к аналоговому контакту A0 платы Arduino.
Чтобы подавать питание на соответствующие катушки шагового двигателя мы будем использовать цифровые контакты 8, 9, 10 и 11 платы Arduino, к которым подключены соответствующие контакты драйвера двигателей ULN2003. Потенциометр, с помощью которого мы будем управлять вращением шагового двигателя, подключен к аналоговому контакту A0 платы Arduino.
Драйвер мотора запитывается от контакта 5V платы Arduino. Но если вы будете подсоединять какую-нибудь нагрузку к шаговому двигателю, то вам потребуется внешний источник питания для драйвера мотора. Мы в нашем примере эксплуатируем шаговый двигатель без нагрузки, поэтому нам хватило питания от платы Arduino. И не забудьте соединить землю платы Arduino с землей драйвера мотора.
Объяснение программы для платы Arduino
Перед тем как начать писать программу для платы Arduino давайте разберемся что должно происходить внутри этой программы. Как мы уже говорили ранее, мы будем использовать метод 4-шаговой последовательности, то есть нам нужно будет сделать 4 шага чтобы выполнить один полный оборот двигателя.
| Номер шага | Контакты, на которое подается питание | Катушки, на которое подается питание |
| Шаг 1 | 8 и 9 | A и B |
| Шаг 2 | 9 и 10 | B и C |
| Шаг 3 | 10 и 11 | C и D |
| Шаг 4 | 11 и 8 | D и A |
На драйвере мотора есть 4 светодиода, по свечению которых можно судить о том, на какую катушку подается питание в конкретный момент. Более подробно все эти процессы можно посмотреть в видео, приведенном в конце статьи.
Мы напишем программу, в которой необходимое количество шагов для двигателя мы будем вводить в мониторе последовательного порта (serial monitor) платы Arduino. Полный текст программы приведен в конце статьи, здесь же мы рассмотрим наиболее важные его фрагменты.
Как мы рассчитали ранее, полное число шагов для полного оборота нашего шагового двигателя, равно 32, пропишем это в следующей строчке кода:
Далее мы должны сказать плате Arduino через какие ее контакты мы будем управлять шаговым двигателем (то есть к каким ее контактам подключен драйвер мотора).
Stepper stepper (STEPS, 8, 10, 9, 11);
Примечание: последовательность номеров контактов, указанная в приведенной команде (8,10,9,11) – специально упорядочена таким образом чтобы подавать питание на катушки шагового двигателя в правильном порядке. Если вы измените номера контактов, к которым подключен шаговый двигатель, то вы соответствующим образом должны их упорядочить для подачи в приведенную команду.
Мы будем использовать специальную библиотеку для работы с шаговыми двигателями, поэтому для задания скорости вращения шагового двигателя мы можем использовать команду вида:
Для двигателя 28-BYJ48 скорость вращения можно установить в диапазоне от 0 до 200.
Теперь, чтобы двигатель сделал один шаг, мы можем использовать следующую команду:
Количество шагов, которое должен сделать двигатель, определяется переменной “val”. Поскольку мы имеем 32 шага (для оборота) и передаточное число 64 мы должны сделать 2048 (32*64=2048) “шагов” в этой команде для совершения одного полного оборота двигателя.
Соответственно, чтобы шаговый двигатель сделал один шаг по часовой стрелке, необходимо использовать команду:
А один шаг против часовой стрелки:
В нашей программе мы будем считывать значение на аналоговом контакте A0 платы Arduino и сравнивать его с предыдущим значением (Pval). Если оно увеличилось, то мы будем делать 5 шагов двигателем по часовой стрелке, а если уменьшилось – то 5 шагов двигателем против часовой стрелки.
potVal = map(analogRead(A0),0,1024,0,500);
if (potVal>Pval)
stepper.step(5);
if (potVal
stepper.step(-5);
Pval = potVal;
Работа проекта
Когда вы сделаете все необходимые соединения в схеме данного проекта у вас должна получиться примерно следующая конструкция:

После этого загрузите программу в плату Arduino и откройте окно монитора последовательной связи (serial monitor). После этого вы можете вращать ручку потенциометра и наблюдать как в соответствии с ее поворотами шаговый двигатель будет вращаться по часовой и против часовой стрелки.
Исходный код программы
Код программы достаточно простой, я надеюсь у вас не вызовет никаких затруднений реализация данного проекта.