интерфейс передачи данных последовательным двоичным кодом помпа
Помощь по BSD шине
Всем доброго времени суток. Если Вы прочитав дальше текст, захотите написать – езжай к специалистам, то сначала посмотрите откуда я, а потом где это и думаю все поймете 🙂
E70 3.5i американец 2010 г. Катушки, форсунки, свечи не менял в последнее время. Вдруг недавно после выключения зажигания помпа начинает на всю работать, да и во время работы двигателя она тоже жужжит на всю мощность. При этом вентилятор молчит, двигатель не перегревается (смотрю через приборку). По началу датчик уровня масла работал исправно, из за помпы садился аккум и датчик ibs работал, показывая что аккум разрядился. Сейчас же ни датчик уровня масла (пишет измерение невозможно), ни датчик ibs не работают (не показывает разряженность аккумулятора, не отключает потребителей для экономии). Генератор до этого исправно давал 14.7 В, сейчас же стабильно 13.5-13.7В.
При диагностике Реинголдом вываливается букет из ошибок по шине BSD – генератор, датчик ibs, датчик уровня масла и помпа, но если ошибки удалить то первоначально появляется ошибка только по помпе, потом сразу по всей шине.
1. Пробовал отключать все абоненты – ничего не меняется, ошибки висят
2. Подключал только датчик уровня масла – работает, масло показывает
3. Остальные комбинации ничего на дают
Бывает иногда после удаления ошибок и чтения машины заново, вылезают ошибки по всем 4 абонентам, НО по помпе именно 2 ошибки:
1. 378F Интерфейс передачи данных последовательным двоичным кодом, сообщение: электрический насос охлаждающей жидкости: отсутствует
2. 3B9A Интерфейс передачи данных последовательным двоичным кодом, сообщение: электрический насос охлаждающей жидкости: отсутствует
Все штекера и соединения в порядке. Больше склоняюсь к генератору потому что хоть и работает, но напряжения мало стал давать и датчику ibs, потому что вообще не подает признаков жизни. Помпа хоть и работает на всю но двигатель не перегревается, а датчик масла при подключении только него работает. Помпа в диагностике не выходит на связь. Прокачать систему тоже не хочет. НО я так понял если дело в помпе, то отключив фишку с нее, остальные абоненты должны заработать, но этого не происходит
Из имеющегося подкидывал только датчик масла, но шина также дает ошибки. Остального нет.
Самое главное – хочется найти причину точную, а не менять все подряд, благо каждый из абонентов не дешев. Буду благодарен за любую помощь
Интерфейс передачи данных последовательным двоичным кодом помпа
Часто задаваемые вопросы по структурам шин: Все модели, начиная с E38 и MINI
Представленный документ не дает исчерпывающих сведений о передаче данных. Далее даются краткие ответы на часто задаваемые вопросы:
1. Почему шин так много?
3. Что означает «High-Speed» и «Low-Speed» или «Высокий и низкий уровень» у шин CAN?
4. Что такое «кольцо», «звезда» и «шина» применительно к шинам передачи данных?
5. Что означает «подшина», «ведущее устройство» и «исполнительное устройство»?
6. К каким стандартам относятся шины «K-Bus» и «P-Bus»?
7. Зачем нужна шина «I-Bus Japan»?
8. Почему шины I-Bus и K-Bus могут быть также подшинами?
9. Что такое синхронный или асинхронный канал у шины MOST?
11. Что представляет собой провод активизации?
12. Почему шина PT-CAN на одних сериях имеет провод активизации, а на других не имеет?
13. Для чего служат согласующие сопротивления?
14. Что означает «K-Line», «TxD1» и «TxD2»?
15. Что означает «BSD»: интерфейс передачи данных последовательным двоичным кодом?
16. Что означает «D-CAN»: Diagnostics-on-CAN?
17. Что означает «FlexRay»: шинная система FlexRay?
1. Почему шин так много?
Существует три ответа на этот вопрос:
1. На самом деле шин не так много, потому что: все шины CAN берут свое начало от шин PT-CAN и K-CAN.
PT-CAN имеет высокую скорость передачи данных.
K-CAN имеет низкую скорость передачи данных.
Многие внутрисистемные шины CAN (подшины) названы по этим системам. Поэтому существует так много обозначений шин.
Аналогичная ситуация с шиной K-Bus: шина P-Bus и I-Bus идентичны шине K-Bus.
2. Шины разрабатывались с расчетом на разную скорость передачи данных.
— Шины со средней скоростью: PT-CAN и K-CAN, а также родственные им шины
— Шины с низкой скоростью: например, шина LIN
3. Исторически шины разрабатывались по отраслевым стандартам или по внутренним стандартам BMW:
— Отраслевые стандарты: CAN, LIN-Bus, MOST и FlexRay.
Целью было связать в одну сеть блоки управления привода и ходовой части.
Чтобы эти блоки управления могли общаться между собой, необходимо было определиться со стандартом шины. Стандарт задает, какие сообщения будут пересылаться между блоками управления и как это должно происходить.
Составляющими сообщения по CAN являются: SOF, CRC, ID, DEL, ACK, KBT, EOF, IFS
В автомобиле имеется несколько шин CAN с разными скоростями передачи данных. Шины CAN с разными скоростями передачи данных соединены между собой межсетевыми преобразователями (шлюзами).
3. Что означает «High-Speed» и «Low-Speed» или «Высокий и низкий уровень» у шин CAN?
«High-Speed» и «Low-Speed» означают скорость передачи данных по шинам CAN. На BMW приняты 2 скорости шин CAN:
«высокий уровень» и «низкий уровень» обозначают два провода двухпроводной шины. Например,
— «K-CAN высокого уровня» или «PT-CAN высокого уровня»:
провод для сигнала с более высоким значением напряжения.
— «K-CAN низкого уровня» или «PT-CAN низкого уровня»:
провод для сигнала с более низким значением напряжения.
Передача данных по 2 проводам более надежна, меньше зависит от помех и электромагнитных полей.
CAN High-Speed: PT-CAN или F-CAN
График показывает оба уровня передачи данных по PT-CAN или F-CAN.
CAN Low-Speed: K-CAN
На диаграмме показаны оба уровня сигналов, передаваемых по шинам K-CAN (см. выше).
Примечание: K-CAN в случае неисправности может продолжать работать в качестве однопроводной шины.
Когда у шины K-CAN выходит из строя один провод, данные продолжают передаваться по второму проводу. Поэтому шины K-CAN более надежны.
4. Что такое «кольцо», «звезда» и «шина» применительно к шинам передачи данных?
Блоки управления могут быть подсоединены к шине разными способами:
Линейное расположение блоков управления
Шины CAN имеют такую структуру.
Поэтому к ней часто «прицепляют» подшины (см. ниже).
Расположение блоков управления кольцом
У BMW такую структуру имеет шина MOST. Межсетевыми преобразователями выступают M-ASK или CCC.
можно однозначно определить, какой блок за каким следует.
требуются меры по обеспечению надежности на случай выхода одного блока управления из строя.
Расположение блоков управления звездой
На BMW E65, E66 такую структуру имеет система ISIS (ISIS: единая интеллектуальная система безопасности). Центральным блоком в звезде является SGM (модуль безопасности и межсетевого обмена).
У первых E65 и E66 SIM (информационный модуль безопасности) был центральным блоком управления в звезде.
высокие скорости передачи данных.
Высокая надежность: выход из строя одного блока управления не отражается на других блоках.
5. Что означает «подшина», «ведущее устройство» и «исполнительное устройство»?
Данные, передаваемые между задающим и исполнительным блоками, нагружают только подшину и оставляют свободной шину высшего уровня.
Для подшин существует много обозначений: «Local-CAN», «Private-CAN». Сами названия говорят о том, что речь идет о подчиненных шинах.
Ведущие и исполнительные устройства имеются также в шинной сети MOST: главный блок является ведущим. Он управляет всеми функциями. Исполнительные устройства лишь выполняют функции.
При диагностике диагностическая система BMW выполняет роль ведущего устройства. Все блоки управления при этом являются исполнительными устройствами: ЭБУ передают данные в тестер BMW. Во время диагностики тестер BMW является «ведущим устройством».
6. К каким стандартам относятся шины «K-Bus» и «P-Bus»?
K-Bus и P-Bus являются разработкой BMW и относятся к особому стандарту.
7. Зачем нужна шина «I-Bus Japan»?
У E65, E66 в экспортном исполнении для Японии JNAV и TEL не подстраивались под шину MOST (по техническим причинам). Поэтому эти блоки управления подключены к шине I-Bus Japan и соединены с шиной MOST через FBI (FBI: гибкий интерфейс шин).
8. Почему шины I-Bus и K-Bus могут быть также подшинами?
В принципе, любая шина может играть роль подшины. Важно только, чтобы подшина была подключена к шине высшего порядка через межсетевой преобразователь. Два примера:
E83, E85, E86, E87, E90: Шина K-Bus является подшиной между DWA и SINE.
Примечание: На рисунках подшины показываются пунктирными линиями.
Шины I-Bus, K-Bus и F-CAN могут выступать в роли подшин. На рисунках подшины показываются пунктирными линиями.
9. Что такое синхронный или асинхронный канал у шины MOST?
Шина MOST имеет различные каналы для передачи данных по оптоволоконному кабелю:
— синхронная передача данных: ТВ (передача цифровых аудиосигналов), CD, DVD.
— асинхронная передача данных: NAV и ТВ (передача, например, телетекста и списка станций).
— передача контрольных данных: состояние, диагностика, сообщения от межсетевого преобразователя.
10. Что означает «синхронно и асинхронно» применительно к шине byteflight? Шина byteflight сочетает в себе синхронную и асинхронную передачу данных для обеспечения надежности при передаче критической с точки зрения безопасности информации:
— синхронная передача данных: отдельные блоки управления циклично (регулярно) посылают сообщения.
— асинхронная передача данных: параллельно синхронной передаче посылаются сообщения, обусловленные каким-либо событием.
Преимущество сочетания синхронной и асинхронной передачи данных по шине byteflight :
Все блоки управления регулярно посылают данные, и шина byteflight при этом не перегружается (перегрузка является одним из возможных недостатков синхронной передачи).
Срочные сообщения могут иметь приоритет при пересылке.
11. Что представляет собой провод активизации?
Шина PT-CAN нуждается в проводе активизации. Без него шина PT-CAN функционировать не может. Провод активизации (контакт 15 Wake-up частично вплетен в ленточный кабель шины PT-CAN (3-жильный ленточный кабель). У E90 провод активизации частично проходит вне плоского ленточного кабеля PT-CAN. На схемах в SI Описание систем (SBT) провод активизации показан линией между двумя проводами PT-CAN: PT-CAN высокого уровня и PT-CAN низкого уровня.
12. Почему шина PT-CAN на одних сериях имеет провод активизации, а на других не имеет?
Автомобили с бортовой сетью 2000 в большинстве случаев имеют провод активизации для блоков управления, подключенных к шине PT-CAN. На этих автомобилях блок управления CAS (система доступа в автомобиль) активизирует остальные блоки управления на шине PT-CAN с помощью сигнала активизации при включении контакта 15.
На ранних сериях устанавливается шина PT-CAN без провода активизации. Это объясняется тем, что на ранних сериях (например, на E85) каждый блок управления имеет собственный вход для контакта 15. Т. е. каждый блок управления активизируется через вход для контакта 15 при включении контакта 15. В отдельном проводе активизации не было необходимости.
Согласующие сопротивления нужны шинам для того, чтобы не допустить отражения сообщений. Без согласующих сопротивлений сообщения и сигналы, передаваемые по шине, отражаются. При неисправности согласующего сопротивления передача данных по шине нарушается.
Согласующие сопротивления подбираются к шинам:
Шина PT-CAN нуждается в иных согласующих сопротивлениях, нежели шина F-CAN.
Согласующие сопротивления в различных блоках управления зависят от комплектации.
14. Что означает «K-Line», «TxD1» и «TxD2»?
Эти 3 обозначения относятся к различным диагностическим кабелям:
Этот диагностический протокол рассылается со скоростью 115 Мбит на все блоки управления.
На протокол OBD реагируют все влияющие на состав ОГ блоки управления. Влияющими на состав ОГ являются все блоки управления, которые обеспечивают соблюдение норм токсичности ОГ. Межсетевой преобразователь распознает подключение контрольного дисплея (Scan-Tools) по протоколу OBD. При подключении контрольного дисплея к гнезду диагностического разъема межсетевой преобразователь посылает протокол OBD по шине PT-CAN. Отвечают только влияющие на состав ОГ блоки управления.
По TxD2 на специальный контрольный дисплей проверяющего пересылаются все официально предписанные данные протокола OBD.
Все остальные блоки управления диагностируются через блок управления, который выполняет функции межсетевого преобразователя (например, KOMBI).
Технические причины создания обоих кабелей TxD: Через гнездо диагностического разъема считываются данные только тех блоков управления, которые влияют на состав ОГ. Т. е. возможные неисправности других блоков управления не определяются.
В гнезде диагностического разъема тестера BMW оба кабеля перемыкаются. Т. е. с помощью диагностической системы BMW считываются и анализируются данные с обоих кабелей TxD.
15. Что означает «BSD»: интерфейс передачи данных последовательным двоичным кодом?
BSD называется «интерфейс передачи данных последовательным двоичным кодом», так как биты передаются и принимаются не параллельно, а друг за другом.
Блок управления двигателем «общается» через интерфейс передачи данных последовательным двоичным кодом со следующими узлами (в зависимости от серии, двигателя и комплектации):
— Регулировка напряжения генератора
Регулировка напряжения генератора через интерфейс передачи данных последовательным двоичным кодом происходит следующим образом. При каждом запуске двигателя блок управления двигателем через BSD опрашивает генератор. Генератор посылает на блок управления двигателем данные, содержащие тип, мощность и название изготовителя.
По этим данным блок управления двигателем рассчитывает заданные значения для работы генератора.
— Контрольная лампа заряда
На автомобилях с BSD прямое соединение генератора с контрольной лампой заряда отсутствует. Генератор посылает данные только на блок управления двигателем. Блок управления двигателем включает контрольную лампу заряда.
Блок управления предпусковым подогревом и блок управления DDE общаются друг с другом через BSD следующим образом:
— Блок управления DDE задает мощность подогрева для свечей накаливания устройства предпускового разогрева (в зависимости от температуры охлаждающей жидкости и напряжения бортовой сети). Блок управления DDE записывает данные, имеющие отношение к диагностике блока управления предпусковым подогревом.
— Блок управления предпусковым подогревом контролирует активизацию отдельных свечей накаливания. Он распознает неисправности свечей накаливания (например, короткое замыкание на массу, обрыв, слишком высокую температуру выходного каскада). Блок управления предпусковым подогревом сообщает о возможных неисправностях на блок управления DDE. Блок управления DDE записывает код неисправности.
> только с двигателем N52
Двигатель N52 имеет электроприводной насос охлаждающей жидкости (механический с приводом от клинового рифленого ремня больше не используется). Электрический насос охлаждающей жидкости при необходимости регулируется блоком управления двигателем (через BSD).
Датчик состояния масла определяет качество, количество и температуру масла в двигателе (англ. » Q uality, L evel, T emperature»). Эти данные через BSD посылаются на блок управления двигателем. Блок управления двигателем анализирует эти данные.
16. Что означает «D-CAN»: Diagnostics-on-CAN?
Основанием для этого перехода является новое положение законодательства США, согласно которому начиная с 2008 года все выпускаемые автомобили должны быть оборудованы интерфейсом D-CAN.
D-CAN имеет скорость передачи данных 500 кбит/с и выполнен на основе 2-жильного кабеля. Для диагностики необходим оптический программирующий прибор (OPS) или оптический контрольно-программирующий прибор (OPPS), а также новый переходный кабель (кабель с зеленой маркировкой и надписью «CAN included»), поскольку диагностическая головка не имеет разъема D-CAN.
17. Что означает «FlexRay»: шинная система FlexRay?
Поводом к созданию FlexRay послужили растущие технические требования к коммуникационной системе, объединяющей в сеть блоки управления в автомобиле, и понимание того, что для инфраструктурных систем необходимо открытое и универсальное решение.
Для совместной разработки FlexRay был учрежден консорциум, в который вошли почти все крупные мировые производители автомобилей и их смежники, а также изготовители полупроводниковой техники и системные эксперты в сфере коммуникационных технологий.
FlexRay обеспечивает высокоскоростную передачу данных в режиме реального времени между электрическими и мехатронными компонентами автомобиля. Со скоростью передачи данных в 10 Мбит/с интерфейс FlexRay работает намного быстрее шин передачи данных, применяемых сегодня для связи с блоками управления систем кузова и привода/ходовой части.
— скорость передачи данных 10 Мбит/с (для сравнения, CAN: 0,5 Мбит/с)
— малое время цикла 2,5 мс (для сравнения, CAN: 10 мс)
— возможность реализации простой и понятной шинной структуры (например, без межсетевых преобразователей)
— гарантированная передача сообщений в режиме реального времени (для сравнения, CAN: режим реального времени не предусмотрен)
— синхронизация блоков управления
В пространственно распределенной системе регулирования разные блоки управления могут принимать заданные значения одновременно.
— за счет детерминизма и дополнительного 2-го канала
Интерфейсы микроконтроллеров (Часть 2)
начало — www.drive2.ru/b/2602560/ Двухпроводной последовательный интерфейс TWI / I2C
Двухпроводной последовательный интерфейс TWI (Two-wire Serial Interface) является полным аналогом базовой версии интерфейса I2C (двухпроводная двунаправленная шина) фирмы Philips. Этот интерфейс позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей из линии тактового сигнала (SCL) и линии данных (SDA). Двухпроводной интерфейс (TWI) — двунаправленная двухпроводная последовательная шина передачи данных, совместимая со стандартными шинами I2C и SMBus. Устройство, подключенное к шине, должно быть либо ведущим, либо подчиненным. Ведущее устройство инициирует передачу данных путем передачи адреса подчиненного устройства и типа передачи: чтение или запись. Если к шине подключено несколько ведущих устройств и некоторая их часть одновременно инициировала передачу, применяется механизм арбитража, который учитывает приоритет этих устройств. Модуль TWI микроконтроллеров может работать и в роли ведущего, и в роли подчиненного устройства. Ведущая и подчиненная работа полностью отделены друг от друга и предусматривают отдельное управление включением/отключением. Для этих функций также предусмотрены отдельные регистры управления и статуса, а также векторы прерываний. Потеря арбитража, ошибки, коллизии и удержание линии синхронизации обнаруживаются на аппаратном уровне и индицируются отдельными флагами статуса для ведущего и подчиненного режимов. Ведущий модуль содержит программируемый генератор скорости связи. Даже при синхронизации системы низкими частотами, поддерживается возможность работы шины на частоте 100 и 400 кГц. При необходимости автоматического выполнения операций и снижения сложности программы могут быть разрешены команды QUICK и режим SMART. В подчиненном модуле на аппаратном уровне реализована возможность распознавания 7-битного адреса и адреса общего вызова. Также поддерживается 10-битная адресация. Предусмотренный регистр маски адреса может выступать в роли второго регистра сравнения, если требуется обнаружение двух подчиненных адресов, или регистра маски, если требуется обнаружение адресов, принадлежащих заданному диапазону. Логика подчиненного модуля продолжает работать во всех экономичных режимах работы МК, в т.ч. POWER DOWN. Благодаря этому, подчиненный модуль способен возобновить активную работу МК при обнаружении совпадения адреса. При необходимости программного слежения за адресами, аппаратную функцию обнаружения совпадения адреса можно отключить. Потребность в этом может возникнуть, когда необходимо обнаруживать несколько различных адресов и реагировать на них. При необходимости автоматического выполнения действий и снижения сложности программы можно задействовать режим SMART. Модуль TWI содержит логику контроля состояния шины, которая накапливает информацию для обнаружения условий START и STOP, коллизий и ошибок шины. С её помощью можно определить состояние шины в ведущем режиме (IDLE, OWNER, BUSY или UNKNOWN). При необходимости подключения к внешнему драйверу шины по 4-проводному интерфейсу, внутренние драйверы модуля TWI можно отключить.
Принцип действия шины TWI
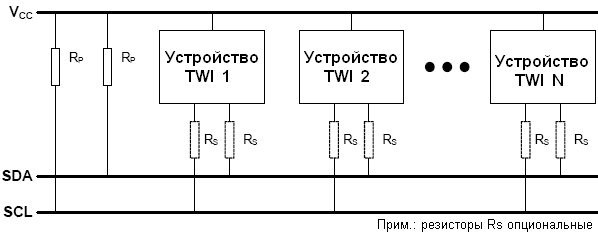
Двухпроводной интерфейс (TWI) подключается к простой двухпроводной и двунаправленной шине, которая состоит из двух линий: линия синхронизации (SCL) и линия последовательной передачи данных (SDA). Источниками сигналов для обеих линий являются схемы с открытым коллектором в выходном каскаде (используется принцип «монтажного И»). Для создания высоких логических уровней на линиях шины, в т.ч. когда к шине не подключено ни одно устройство, необходимы подтягивающие к плюсу питания резисторы (Rp) — единственно необходимые внешние компоненты. Альтернативно, вместо подтягивающих резисторов могут использоваться источники тока. Шина TWI является простым и эффективным средством соединения по последовательной шине нескольких устройств. Устройство, подключенное к шине, может быть либо ведущим (master), либо подчиненным (slave). Чтобы передача по шине стала возможной, к ней должно быть подключено как минимум одно ведущее устройство. Топологию шины TWI иллюстрирует рисунок 9.
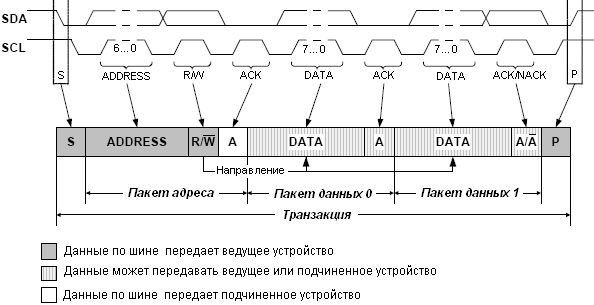
Каждое подключенное к шине подчиненное устройство должно иметь собственный неповторяющийся адрес, передачей которого ведущее устройство инициирует транзакцию. Могут использоваться 7- или 10-битные адреса. К одной шине допускается подключение нескольких ведущих устройств. Такая шина называется мультимастерной. Для определения, какое из одновременно осуществляющих доступ к шине ведущих устройств имеет приоритет, используется механизм арбитража. Устройство может содержать, как логику ведущего устройства, так и логику подчиненного устройства. Кроме того, оно может эмулировать работу нескольких подчиненных устройств, путем реагирования на несколько адресов. Ведущее устройство сигнализирует о начале транзакции генерацией на шине условия START (S). Затем, передается пакет адреса с адресом подчиненного устройства (ADDRESS) и указание желаемого направления передачи данных, т.е. чтение или запись (R/W). По завершении передачи всех пакетов данных (DATA), ведущее устройство генерирует на шине условие STOP (P) и транзакция завершается. После приема каждого байта получатель данных генерирует бит подтверждения (A или ACK) или неподтверждения (/A или NACK). Транзакция шины TWI показана на рисунке 10.
Сигнал синхронизации транзакции генерирует ведущее устройство, однако, в целях снижения быстродействия шины, любое подключенное к шине устройство может увеличить длительность импульса низкого уровня.
CAN (Control Area Network) — последовательная магистраль, обеспечивающая увязку в сеть «интеллектуальных» устройств ввода/вывода, датчиков и исполнительных устройств некоторого механизма или даже предприятия. Характеризуется протоколом, обеспечивающим возможность нахождения на магистрали нескольких ведущих устройств, обеспечивающим передачу данных в реальном масштабе времени и коррекцию ошибок, высокой помехоустойчивостью. Система CAN обеспечена большим количеством микросхем, обеспечивающих работу подключенных к магистрали устройств, разработку которых начинала фирма BOSH для использования в автомобилях, и в настоящее время широко используемых в автоматизации промышленности. Предназначен для организации высоконадежных недорогих каналов связи в распределенных системах управления. Интерфейс широко применяется в промышленности, энергетике и на транспорте. Позволяет строить как дешевые мультиплексные каналы, так и высокоскоростные сети. Скорость передачи задается программно и может быть до 1 Мбит/с. Пользователь выбирает скорость, исходя из расстояний, числа абонентов и емкости линий передачи. Максимальное число абонентов, подключенных к данному интерфейсу фактически определяется нагрузочной способностью примененных приемопередатчиков. Например, при использовании трансивера фирмы PHILIPS PCA82C250 она равна 110. Протокол CAN использует оригинальную систему адресации сообщений. Каждое сообщение снабжается идентификатором, который определяет назначение передаваемых данных, но не адрес приемника. Любой приемник может реагировать как на один идентификатор, так и на несколько. На один идентификатор могут реагировать несколько приемников. Протокол CAN обладает развитой системой обнаружения и сигнализации ошибок. Для этих целей используется поразрядный контроль, прямое заполнение битового потока, проверка пакета сообщения CRC-полиномом, контроль формы пакета сообщений, подтверждение правильного приема пакета данных. Хемминговый интервал d=6. Общая вероятность необнаруженной ошибки 4.7×10-11. Система арбитража протокола CAN исключает потерю информации и времени при «столкновениях» на шине. Интерфейс с применением протокола CAN легко адаптируется к физической среде передачи информации. Это может быть дифференциальный сигнал, оптоволокно, просто открытый коллектор и т.п. Несложно делается гальваническая развязка. Элементная база, поддерживающая CAN, широко выпускается в индустриальном исполнении. Полная спецификация СAN приведена здесь — www.gaw.ru/data/Interface/CAN_BUS.PDF
Описание интерфейса CAN
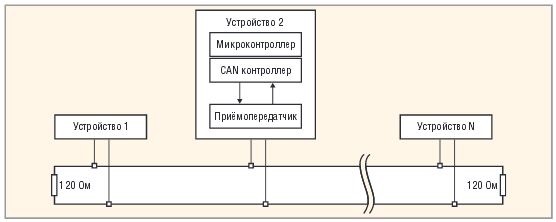
Интерфейс CAN предназначен для организации последовательных, высоконадёжных и недорогих каналов связи в распределённых системах управления. Он позволяет организовывать как мультиплексные каналы, так и высокоскоростные сети. Данный интерфейс имеет протокол, поддерживающий возможность нахождения на магистрали нескольких ведущих устройств и обеспечивает передачу данных в реальном масштабе времени. Интерфейс обладает высокой помехоустойчивостью благодаря коррекции ошибок. Передача данных осуществляется кадрами, которые принимаются всеми устройствами сети. Кадр состоит из идентификатора длиной 11 бит для стандартного формата или 29 бит для расширенного формата и блока данных, содержащего от 0 до 8 байт. Идентификатор описывает содержимое пакета данных и служит для определения приоритета при по¬пытке одновременной передачи несколькими устройствами. Скорость передачи данных выбирается исходя из расстояния, числа абонентов в сети и ёмкости линии связи. Она задаётся программно и может составлять от десятка Кбод до единиц Мбод. Стандарт интерфейса CAN определяет передачу данных независимо от физического уровня, т.е. канал связи может быть каким угодно, например, радиоканалом или оптоволокном. Однако на практике под CAN-интерфейсом обычно подразумевается сеть с физическим каналом связи в виде дифференциальной пары проводов, определённым в стандарте ISO 11898. На рисунке 11 приведена схема подключения устройств к интерфейсу CAN.
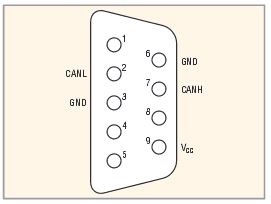
Стандартное назначение выводов для широко распространённого 9-контактного разъёма интерфейса CAN приведено на рисунке 12.
Интерфейс CAN относится к типу сетей CR (Collision Resolution, разрешение коллизий), в отличие от сетей типа CD (Collision Detect, обнаружение коллизий), например Ethernet. Тип сетей CR обеспечивает приоритетный доступ к передаче сообщения, что необходимо для промышленных устройств. Приоритетный доступ к передаче сообщений в стандарте ISO-11898 реализуют так называемые рецессивные и доминантные биты. В зависимости от типа шины, объединяющей устройства CAN, эти биты могут принимать значение лог. 0 либо лог. 1. В таблице приведены два примера организации шин, поясняющие образование управляющих битов.
Спецификация интерфейса CAN избегает описания двоичных значений сигналов, как лог. 0 либо лог. 1, с целью абстрагирования от среды передачи. Именно поэтому вместо них применяются термины «рецессивный» и «доминантный» биты. При этом подразумевается, что при передаче одним устройством сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня с помощью радиоканала отсутствие сигнала означает рецессивный бит, а наличие сигнала — доминантный. Стандарт сети требует от физического уровня передачи, чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать свет, а рецессивному — его отсутствие. В электрическом проводе рецессивное состояние соответствует высокому потенциалу на линии связи, а доминантное — низкому потенциалу, т.е. когда устройство подключает линию связи к нулевому потенциалу. Если линия находится в рецессивном состоянии, перевести её в доминантное состояние может любое устройство сети, например, включив свет в оптоволокне.
Кадры и их форматы
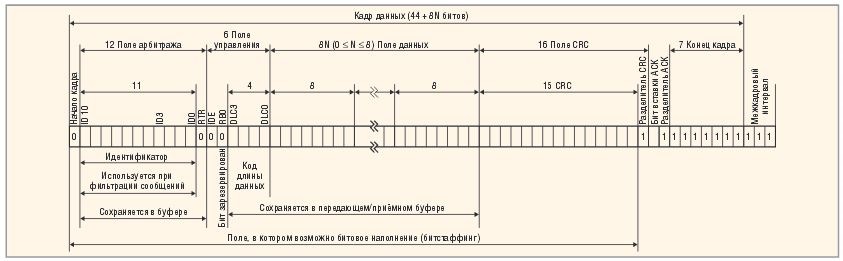
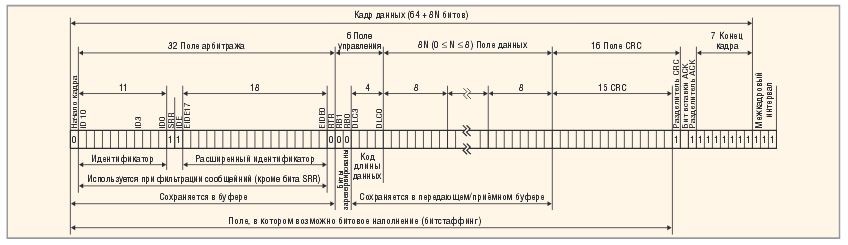
Кроме рецессивного и доминантного битов, стандарт интерфейса CAN оперирует таким понятием, как кадр, который используется в протоколе обмена информацией между устройствами. Каждый кадр представляет собой единый набор нескольких служебных битов и байтов. Существуют следующие виды кадров: • кадр данных (data frame) служит для передачи данных; • кадр запроса передачи (remote frame) служит для запроса на передачу кадра данных с тем же идентификатором; • кадр перегрузки (overload frame) обеспечивает промежуток между кадрами данных или кадрами запросов; • кадр ошибки (error frame) передаётся узлом, обнаружившим ошибку. В таблицах ниже представлены базовый формат и расширенный формат кадра данных.
Графическое представление данных кадров, с пояснениями и порядком сле¬дования бит, приведено на рисунках 13 и 14 соответственно. Межкадровый ин¬тервал служит для разделения кадров между собой и состоит как минимум из трёх рецессивных бит. Он необхо¬дим передающему устройству для под¬готовки очередного кадра.
Арбитраж доступа к шине
При наличии в сети нескольких устройств, которые могут формировать запросы, в ней могут возникать конфликтные ситуации, когда эти запросы выставляются одновременно. С целью устранения подобных коллизий в интерфейсе CAN предусмотрен механизм арбитража доступа к шине. Когда шина свободна, любое устройство может начинать передачу в любой момент. В случае одновременной передачи кадров двумя и более устройствами производится арбитраж: передавая биты идентификатора, устройство одновременно проверяет состояние шины. Если при передаче очередного бита на шине присутствует противоположный бит, считается, что другое устройство передаёт сообщение с более высоким приоритетом, и передача откладывается до освобождения шины. Таким образом, в отличие, например, от сети Ethernet, в сети CAN не происходит непроизводительной потери пропускной способности канала при коллизиях. Однако при этом не исключена вероятность того, что сообщения с низким приоритетом никогда не будут переданы.
Защита информации от ошибок
Интерфейс CAN имеет несколько механизмов контроля и предотвращения ошибок. Благодаря арбитражу доступа к шине, производится контроль передачи информации, поскольку при передаче битовые уровни в сети сравниваются с передаваемыми битами Кроме того, интерфейс CAN использует для защиты информации от ошибок контрольную сумму. Каждый раз при передаче информации, передающее устройство вычисляет контрольную сумму пакета данных и добавляет её в передаваемый кадр. Устройство, принимающее информацию, вычисляет контрольную сумму принимаемого кадра и сравнивает её с контрольной суммой принятого кадра. В случае совпадения контрольных сумм устройство передаёт доминантный бит в промежутке подтверждения. После передачи пяти одинаковых битов подряд передаётся дополнительный бит противоположного значения — так называемый бит-вставка (bit stuffing), который позволяет защититься от сбоя синхронизации устройств при передаче данных, состоящих из одного и того же двоичного кода. Упомянутые выше механизмы позволяют обеспечить передачу информации с вероятностью пропуска ошибки 4,7 х 10^-11.
Технические характеристики шины
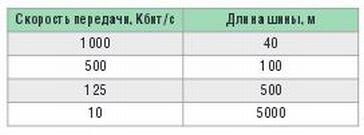
Все устройства в сети CAN должны работать с одинаковой скоростью. Стандарт CAN не определяет скорость работы, но большинство как самостоятельных, так и встроенных в МК контроллеров CAN позволяют плавно изменять скорость в диапазоне от 20 Кбит/с до 1 Мбит/с. Существуют также решения, выходящие далеко за рамки данного диапазона. Приведённые выше методы защиты информации от ошибок требуют, чтобы изменение бита при передаче успело распространиться по всей сети к моменту контроля его состояния передатчиком. Это приводит к обратной зависимости длины шины от скорости передачи: чем больше скорость пере¬дачи информации, тем меньше должна быть длина шины. Соотношения скорости передачи и длины шины для сетей стандарта ISO 11898 приведены в таблице.
На скорость передачи информации и длину шины также оказывает влияние использование оптических пар для защиты устройств от высоковольтных помех. Снижают скорость передачи информации и сильно разветвлённые сети в виде паутины, из-за множества отражений сигнала и большой электрической ёмкости шины.