Отладка Arduino через debugWire (Atmel Studio и AVR Dragon)
В этой статье поговорим о том, как отлаживать программы на плате Arduino UNO с помощью debugWire. Я частенько использую эту платку или Nano для отладки своих программ в Atmel Studio (использовать Arduino IDE у меня рука не поднимается). И так начнем.
Что можно сделать с помощью debugWire?
Прочитать память контроллера, выполнить пошаговую отладку кода, установить точки останова программы, прочитать регистры и значения на портах ввода/вывода и т.п.
Что для этого будет необходимо?
— Arduino Uno
— Atmel Studio 6
— AVR Dragon программатор-отладчик
Подготавливаем железо
В даташите на Atmega328 говорится:
«Конденсаторы, подключенные к пину RESET, должны отключены при использовании debugWire. Все внешние источники сброса должны быть отключены»
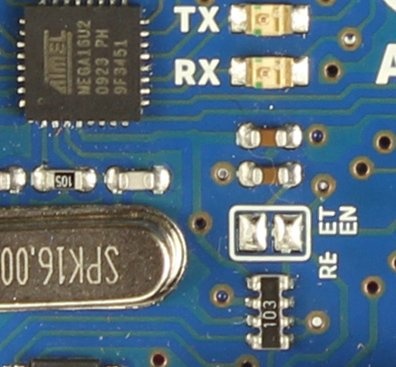
Если проверить схему Arduino Uno, можно увидеть, что к RESET подключен конденсатор 100нФ. В старых версиях Arduino необходимо было снять этот конденсатор для отключения RESET. На новых платах есть специальная перемычка, которая может быть разрезана и запаяна вновь, если потребуется.
Подготовка софта
Просто компилируем код в Atmel Studio, нет необходимости заливать программу отдельно через AVR DUDE, AVR Dragon сам сделает это через debugWire.
Подключаем железо
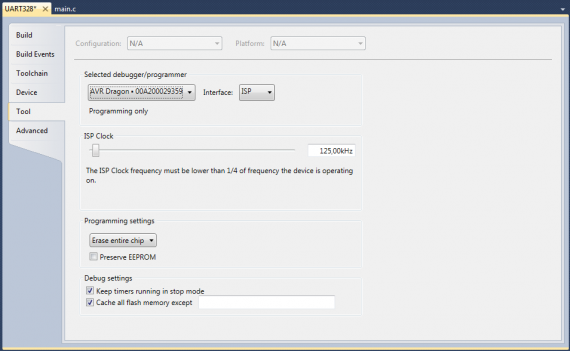
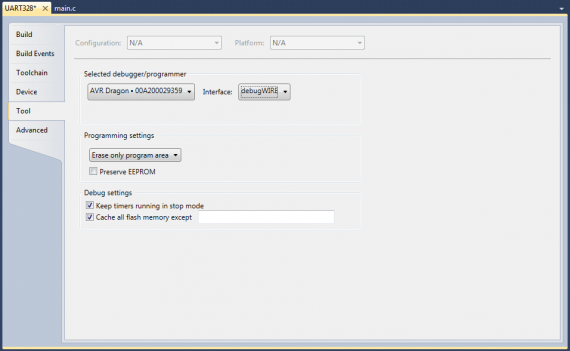
Подключаем ISP от AVR Dragon к ISP Arduino Uno. Обратите внимание, что контакт 1 подключается к PIN1 на другом устройстве, т.е. MISO подключается к MISO. AVR Dragon и Arduino запитываются каждый через свой USB разъем. В настройках выбираем использовать AVR Dragon в качестве отладчика.
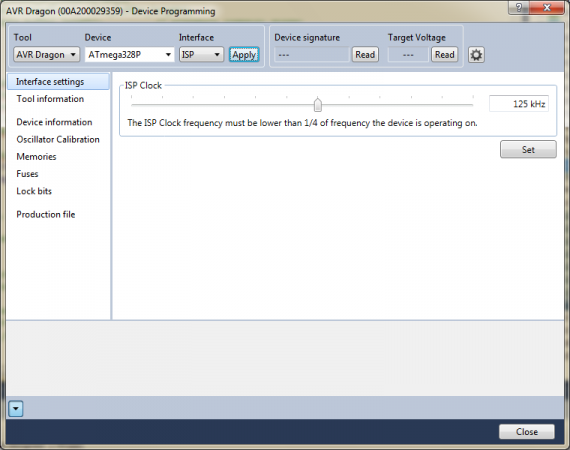
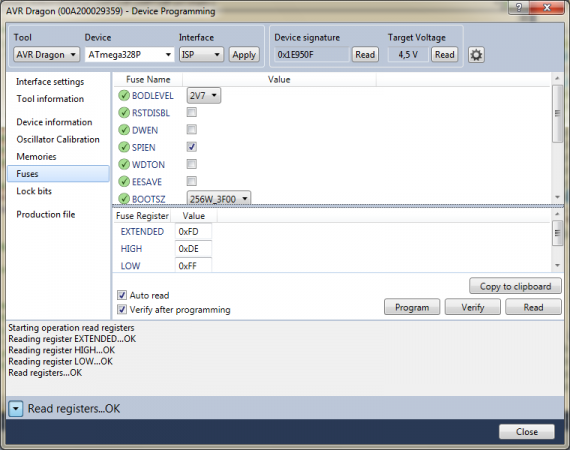
Открываем меню программирования Tools > Device Programming
Внимание «шьем» фьюзы
Собственно устанавливаем фьюз-бит DWEN. В даташите также сказано что LOCK биты не должны быть запрограммированы.
Запускаем debugWire
1. После того как прошили фьюзы временно отключаем питание Arduino Uno.
2. Устанавливаем debugWire как интерфейс для программирования и отладки
3. Жмем «Start Debugging and Break» или Alt+F5. Можно просто нажать F5, а уже потом точки останова расставить. Отладка запускает прошивку тоже.
4. Отлаживаем программу, устанавливаем где надо точки останова, наблюдаем за регистрами и портами ввода-вывода.
5. Останавливаем отладку Ctrl+Shift+F5, изменяем код и возвращаемся к пункту 3.
6. Жмем меню «Debug > Disable debugWIRE» Это меню доступно только во время отладки, так что, если что жмем снова F5. После это DWEN сбрасывается и можно снова использовать ISP.
Вот и все.
Монитор порта, отладка

Как мы с вами знаем из урока “О платформе“, на платах Ардуино стоит USB-TTL конвертер, позволяющий микроконтроллеру в текстовом режиме “консоли” общаться с компьютером по последовательному интерфейсу, Serial. На компьютере создаётся виртуальный COM порт, к которому можно подключиться при помощи программ-терминалов порта, и принимать-отправлять текстовые данные. Через этот же порт загружается прошивка, т.к. поддержка Serial является встроенной в микроконтроллер на “железном” уровне, и USB-TTL преобразователь подключен именно к этим выводам микроконтроллера. На плате Arduino Nano это кстати пины D0 и D1.
К этим же пинам можно подключаться при помощи отдельных плат “программаторов”, например на чипах CP2102 или том же CH340 с целью загрузки прошивки или просто общения с платой. В самой Arduino IDE тоже есть встроенная “консоль” – монитор порта, кнопка с иконкой лупы в правом верхнем углу программы. Нажав на эту кнопку мы откроем сам монитор порта, в котором будут настройки: 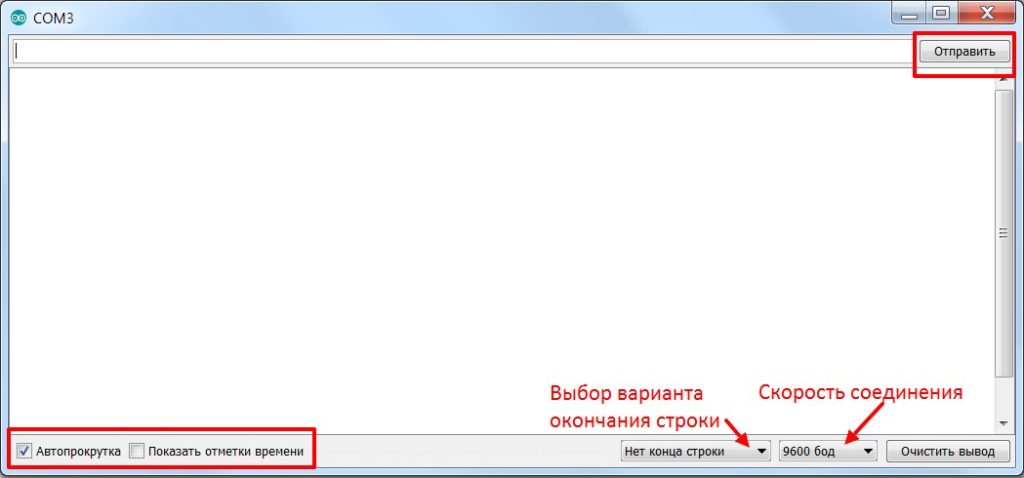
Если с отправкой, автопрокруткой, отметками времени и кнопкой “очистить вывод” всё понятно, то конец строки и скорость мы рассмотрим подробнее:
Объект Serial
Запустить связь по Serial на скорости speed (baud rate, бит в секунду). Скорость можно поставить любую, но есть несколько “стандартных”. Список скоростей для монитора порта Arduino IDE:
Отправляет в порт значение val – число или строку. В отличие от write выводит именно символы, т.е. отправив 88 вы получите 88: Serial.print(88); выведет 88. Также метод print/println имеет несколько настроек для разных данных, что делает его очень удобным инструментом отладки:
format позволяет настраивать вывод данных: BIN, OCT, DEC, HEX выведут число в соответствующей системе исчисления, а цифра после вывода float позволяет настраивать выводимое количество знаков после точки
Читает данные из буфера и ищет набор символов target (тип char), опционально можно указать длину length. Возвращает true, если находит указанные символы. Ожидает передачу по таймауту
Плоттер
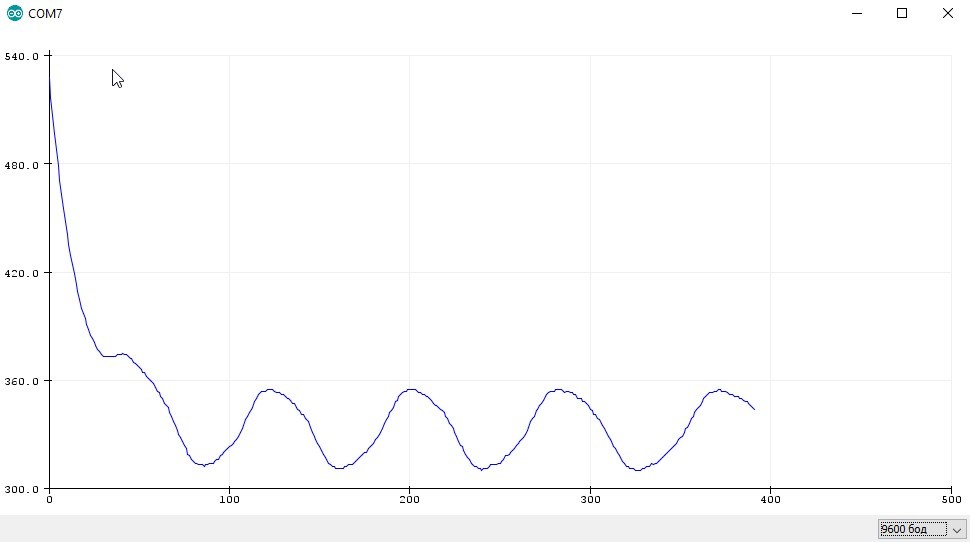
Помимо монитора последовательного порта, в Arduino IDE есть плоттер – построитель графиков в реальном времени по данным из последовательного порта. Достаточно отправить значение при помощи команды Serial.println(значение) и открыть плоттер по последовательному соединению, например построим график значения с аналогового пина A0:
 Плоттер поддерживает несколько линий графиков одновременно, для их отображения нужно соблюдать следующий протокол отправки данных: значение1 пробел_или_запятая значение2 пробел_или_запятая значение3 пробел_или_запятая значениеN перенос_строки, то есть значения выводятся в одну строку, одно за другим по порядку, разделяются пробелом или запятой, и в конце обязательно перенос строки. Давайте выведем несколько случайных величин:
Плоттер поддерживает несколько линий графиков одновременно, для их отображения нужно соблюдать следующий протокол отправки данных: значение1 пробел_или_запятая значение2 пробел_или_запятая значение3 пробел_или_запятая значениеN перенос_строки, то есть значения выводятся в одну строку, одно за другим по порядку, разделяются пробелом или запятой, и в конце обязательно перенос строки. Давайте выведем несколько случайных величин:
Вывод значений происходит каждые 10 миллисекунд, а каждые 300 миллисекунд значения обновляются. Получаем вот такой график: 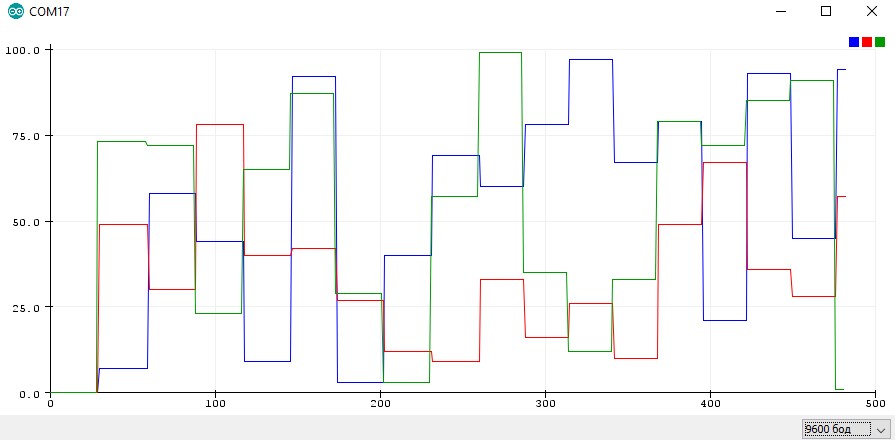 В Arduino IDE с версии 1.8.10 добавили возможность подписать графики, для этого перед выводом нужно отправить названия в виде название 1, название 2, название n с переносом строки, и дальше просто выводить данные:
В Arduino IDE с версии 1.8.10 добавили возможность подписать графики, для этого перед выводом нужно отправить названия в виде название 1, название 2, название n с переносом строки, и дальше просто выводить данные: ![]()
Использование пинов
Как я писал выше, аппаратный Serial имеет выводы на ноги микроконтроллера, для Nano/Uno/Mini это выводы D0 и D1. Можно ли работать с этими пинами, как с обычными цифровыми пинами? При отключенном Serial – можно, при включенном – нет. После вызова Serial.begin() ноги перестают функционировать как цифровые пины в ручном режиме, но после вызова Serial.end() можно снова ими пользоваться!
Отправка и парсинг
Рассмотрим самый классический пример для всех языков программирования: Hello World! ![]() Отправка данных в порт не должна вызывать трудностей и вопросов, потому что всё понятно/очевидно, да и чуть выше в описании метода print мы рассмотрели все варианты вывода. Отправка в порт позволяет узнать значение переменной в нужном месте программы, этот процесс называется отладка. Когда код работает не так, как нужно, начинаем смотреть, где какие переменные какие значения принимают. Или выводим текст из разных мест программы, чтобы наблюдать за правильностью (порядком) её работы. Давайте вспомним урок циклы и массивы и выведем в порт массив:
Отправка данных в порт не должна вызывать трудностей и вопросов, потому что всё понятно/очевидно, да и чуть выше в описании метода print мы рассмотрели все варианты вывода. Отправка в порт позволяет узнать значение переменной в нужном месте программы, этот процесс называется отладка. Когда код работает не так, как нужно, начинаем смотреть, где какие переменные какие значения принимают. Или выводим текст из разных мест программы, чтобы наблюдать за правильностью (порядком) её работы. Давайте вспомним урок циклы и массивы и выведем в порт массив:
Вывод: 0 50 68 85 15 214 63 254 – элементы массива, разделённые пробелами! Проблемы возникают при попытке принять данные в порт. Дело в том, что метод read() читает один символ, даже если вы отправите длинное число – программа получит его по одной цифре, и составлять число из цифр придётся вручную. Проблема усугубляется тем, что read() читает именно символ, то есть код символа в таблице ASCII. 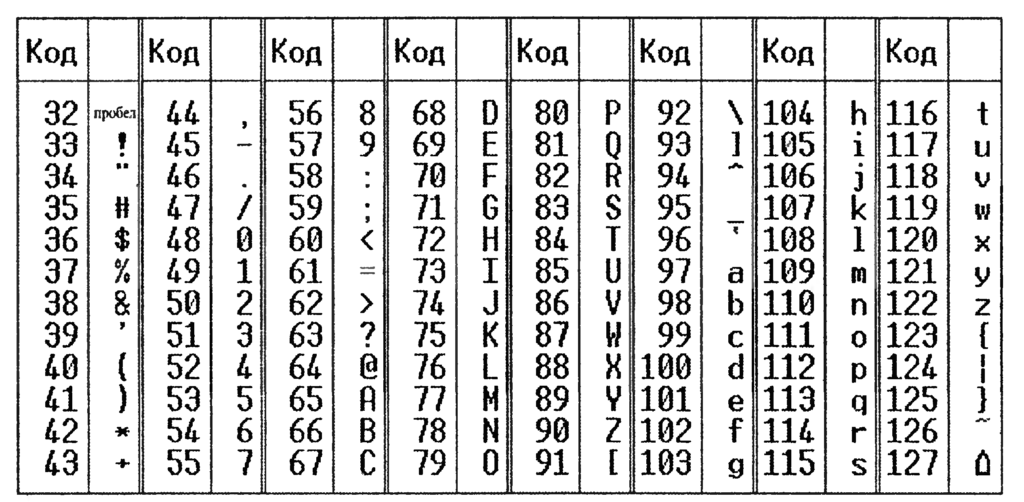 Посмотрим вот такой пример, в котором в порт отправляются принятые в него данные (так называемое эхо):
Посмотрим вот такой пример, в котором в порт отправляются принятые в него данные (так называемое эхо):
Так как же принять именно цифру? Есть хитрость – вычитать из полученного кода символа код цифры 0, либо сам 0 в виде символа: ‘0’
Также для принятия одиночных чисел у нас есть готовый метод – parseInt() / parseFloat() – для целочисленных и рациональных чисел соответственно. Процесс приёма и расшифровки данных называется парсинг (parsing). Давайте примем в порт число 1234, используя готовый метод парсинга.
Теперь после отправки цифры программа будет ждать всего 50 мс, и сразу же вам ответит. Остальные алгоритмы отправки и парсинга, в том числе обмена разнотипными данными между Ардуинами и другими платами смотри в уроке общение по Serial.
Управляющие символы
Существуют так называемые управляющие символы, позволяющие форматировать вывод. Их около десятка, но вот самые полезные из них
Также если для вывода вы захотите использовать одинарные ‘ или двойные кавычки, “ или обратный слэш \ – нужно выводить их при помощи соответствующего спецсимвола, иначе ваш вывод “поломается”, я думаю, не нужно объяснять, почему:
Как использовать? Просто писать в вывод. Например комбинация \r\n переведёт строку и вернёт курсор в левое положение:
Результат скопируем и вставим в excel 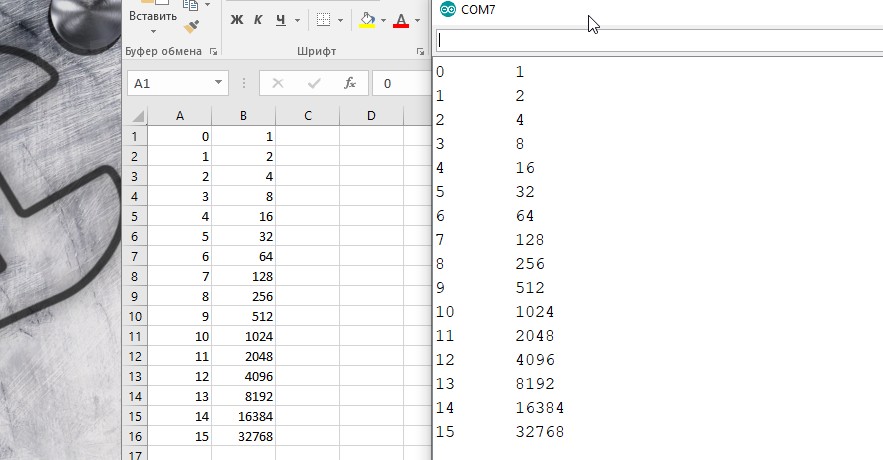 Удобно!
Удобно!
Видео
Arduino.ru
Есть ли средства отладки программ на Ардуино?
Доброго времени суток!
Подскажите как отлаживать программу на языке Ардуино?
Не работает простая функция: в передаваемой переменной типа байт lamps каждый бит отвечает за светодиод, глобальная переменная того же типа current_state_lights хранит в себе текущее состояние вкл. и выкл. светодиодов.
Другая функция включения и выключения ламп с такими же побитовыми операциями работает.
Может быть есть сторонние отладчики?
Или Serial.println(); на каждом шаге.
С Протеусом надо конкретно разбираться, возьму на заметку, спасибо.
Толко не понятно, почему же функция не работает? Ведь оператор if должен по любому совершить одно из двух действий, но не совершает.
А после каждого оператора в коде поставить Serial.println() и delay(2000) чтобы успевать нажать кнопку.
Будет работать такой пошаговый режим и надо ли в обработчике запрещать прерывания на время его выполнения?
Доброго времени суток!
Подскажите как отлаживать программу на языке Ардуино?
Не работает простая функция: в передаваемой переменной типа байт lamps каждый бит отвечает за светодиод, глобальная переменная того же типа current_state_lights хранит в себе текущее состояние вкл. и выкл. светодиодов.
А какие признаки «не работает» и как именно вызывается эта функция?

Можете попробовать такой отладчик (правда не понятно, какой у Вас Ардуино):
Подключается в виде библиотеки. Я раньше пользовался на своем Леонардо.
kisoft: Ардуино Уно
Спасибо большое за библиотеку.
if работает как надо, перед завершением процедуры забыл отправить новое значение в порт 🙂
Я проделал все в точности:
Kisoft: Можете попробовать такой отладчик (правда не понятно, какой у Вас Ардуино):
Подключается в виде библиотеки. Я раньше пользовался на своем Леонардо.
но, к в результате в окне Serial Monitor выскочила какая-то абра-кадабра из непонятных символов. Подскажите, как с этим бороться? Уменя Ардуино Мега 2560.
Есть еще пакет в visualmicro.com, но стоит денег (сама среда бесплатна, денег стоит отладчик). Сам не пробовал.
про протеус вам уже написали, правда нельзя назвать протеус отладчиком, это симулятор всего лишь
права все перечисленное меркнет перед железными отладчиками от атмела ))) но увы ардуина с ними не дружит. Особенно прелестна отладка по JTAG, как раз atmega2560 поддерживает такую отладку. В железном отладчике можно ставить точки останова, видеть состояние портов (не симулятор, а железо!), редактировать значения переменных, eeprom во время отладки без перепрошивки и т.д.
Я проделал все в точности:
Kisoft: Можете попробовать такой отладчик (правда не понятно, какой у Вас Ардуино):
Подключается в виде библиотеки. Я раньше пользовался на своем Леонардо.
но, к в результате в окне Serial Monitor выскочила какая-то абра-кадабра из непонятных символов. Подскажите, как с этим бороться? Уменя Ардуино Мега 2560.
Подключается в виде библиотеки. Я раньше пользовался на своем Леонардо.
Как раз вчера наткнулся на фиготень Visual Micro. На робокрафте был пост про неё, правда старенький.
Раньше эта либа (плагин?) цеплялась на MS Visual Studio. Теперь умеет цепляться ещё и на бесплатную среду Atmel Studio 6.2. (в этой среде, я так понял, используется т.н.»изолированная» либа от того же Visual Studio).
Так вот, как раз они утверждают, что как раз у них полноценно реализованы брыкпоинты. Очень меня это заинтересовало. Но за сегодняшний вечер ни фига не разобрался.
Вероятно, задействован именно этот механизм, что и по ссылке товарища kisoft.
Сухой остаток, мало чего я понял, разве что одно: ЕСТЬ инструменты для отладки на Ардуине! 🙂
ЗЫ сорри, два поста назад эту прогу упоминают уже. Ну да может кто поставит, да подскажет, как эти брыкпойнты активизировать 🙂 а то пока не получилось.
Debugging with the Arduino IDE 2.0
AUTHOR: Karl Söderby & Ubi De Feo
Overview
A newly introduced, yet less famous feature of Arduino IDE 2.0 is the Debugger.
A debugger is a software tool which is used to test and debug programs, hence the name.
It basically goes through a program in a controlled manner, with the help of a hardware interface which can help navigate through the program’s execution. This can be of aid in better understanding the program as well as helping spot potential flaws and code errors.
You can easily download the editor from the Arduino Software page.
Compatible Boards
The debugger is compatible with all SAMD boards. Boards using the SAMD architecture are the following:
Tutorials for the Atmel-ICE and J-Link debuggers uses the MKR WiFi 1010, but can be easily be applied to the boards listed above.
Requirements
You will also need one of the following hardware setups:
Additional accessories such as soldering iron, connectors, jumper wires and USB cables will also be required, depending on what hardware setup you use.
The Arduino Zero board can be used without any external hardware.
Hardware Setup
Below you will find three different tutorials that will help you set up and test the different hardware setups. We recommend you visit them, follow the instructions and come back here to learn how to use the tool!
Arduino Zero
The Arduino Zero does not require any additional hardware, as it already has a built-in debugger. This makes it a great choice for beginners that wants to learn more about debugging.
J-Link
Segger’s J-Link tool is a great option for advanced debugging. The J-Link tool can be connected to the MKR WiFi 1010 board by soldering, where a more detailed guide can be found in the link below:
Atmel-ICE
Atmel-ICE is another great option to use for debugging, and can also be connected to the MKR WiFi 1010 board through soldering. Learn more about debugging with the Atmel-ICE through the link below:
Getting to Know the Debugger
Once you have your hardware set up, we can continue to explore the Debugger tool in the Arduino IDE 2.0.
The Debugger is a brand new tool integrated in the Arduino IDE 2.0. You can easily access it from the sidebar on the left, grouped with the Board Manager, Library Manager, Search and Sketchbook Explorer.
Mind that doing so will only show you its inteface, but the real magic happens when you click the crossed out bug icon in the buttons menu at the top.
Now, in order to use the debugger, we need specific hardware instruments, the choice of which is very dependent on what kind of board/processor you are using, and you will almost always need an external debugger.
Using the Debugger
In order to use the Debugger, we need to upload a sketch to our board first, making sure that the built program will be optimized for debugging, so let’s check that option right away.
Important: You should connect the Arduino Zero through its programming USB port.
In this example, we are going to choose the basic blink sketch. You can easily access this code through File > Examples > Basics > Blink. Upload the code to your Arduino board. When it is finished, it will let you know in the output panel at the bottom.
Once your program has been uploaded, we can start using the debugger.
Breakpoints
Let’s begin by creating something called a breakpoint. Breakpoints are used to stop the program execution at a specific line (or when a specific condition is verified). We can use multiple of these in a program (the number is variable depending on the processor).
In this example, we are going to set a breakpoint for line 33 and line 36. These are set by clicking to the left of the line numbering in the editor.
We can now go through our code, step by step. The first (automatic) stop will be triggered by the Debugger itself, and it will be a standard entry-point, ignore that for now.
Let’s continue, by clicking on the Play/pause button (Continue). The program will now run to the first breakpoint, line 33. If we click it again, it will jump to line 36 (the lines 34 and 35 will still be executed but we won’t see that). Clicking the Play/pause button again will continue running the program which will pause at its next breakpoint, line 33. We’re in the main loop, after all.

Step over
The step over feature basically goes through the operations of a program, step by step. Let’s say we have 20 operations in our program, each doing something unique. The step over can in a way step through these, one by one, and analyse what’s going on at each step.

Step in and Out
Next up is the step in and step out commands. In this example, we are using the and functions. Using step in we basically branch out of the code we wrote, and jump into the code where these functions are defined. In this case, we are inspecting code inside a file which is part of the Arduino framework.
The step out feature is basically the opposite: it returns you to the origin point, and moves to the next step.

Conclusion
In this guide, we have covered some basics on using the Arduino IDE 2.0 Debugger. We explored some different hardware setups that we can use, how to navigate the Debugger tool, and linked some more elaborate hardware guides to make your debugging experience more smooth!
We hope you enjoy the Debugger, and if you are having issues, please report them in Arduino IDE GitHub repository.
More Tutorials
You can find more tutorials in the Arduino IDE 2 documentation page.
Отладка кода Arduino (AVR). Часть 1. Виртуальная отладка
Предисловие
Сборка при помощи Makefile
Прежде чем мы подойдём к описанию отладки в железе (во второй части) нам нужно немного потренироваться. Вероятно многие знают, что среда Arduino вызывает компилятор avr-gcc со всем окружением, автоматически настраивает параметры его вызова и запускает процесс сборки. Так вот, нам нужно повторить этот процесс явно. Делать это мы будем не вручную, хотя некоторые телодвижения всё-таки понадобятся. Нужно это для того, чтобы получить отладочный объектный файл в формате ELF. Среда Arduino подчищает за собой и у нас нет доступа ни к опциям компилятора, ни к результатам компиляции.
Это подводит нас к вопросу использования утилит для автоматической сборки avr-gcc проекта, а ещё точнее — скетча с библиотеками Arduino. Тут можно было бы погрустить, т.к. дело это не простое, но, как говорится, всё уже сделано до нас. Оказывается, на github уже есть всё необходимое именно для сборки скетчей с библиотеками Arduino. Проект называется Arduino-Makefile. Как не трудно догадаться из описания, этот проект содержит Makefile для автоматической сборки проектов на Arduino. Из перечисленных в описании особенностей мы обратим внимание только на некоторые.
Пакет Arduino-Makefile — это набор конфигурационных файлов, примеров и описаний. В нём нет утилит, которые всё это должны использовать. Нет также и среды разработки, т.е. сборка осуществляется через командную строку. Это означает, что вы можете прикрутить любую удобную для вас IDE, которая поддерживает сборку через Makefile. Я обычно использую Visual Studio.
Если внимательно посмотреть на содержимое, то можно заметить, что есть один глобальный универсальный Makefile (Arduino.mk), который включается в специфические местные файлы сборок. Вам нужно указать только частные (минимальные) настройки для конкретной цели сборки, а остальное будет выполнено в автоматическом режиме (настройка переменных, поиск зависимостей и прочее). Это очень удобно, как будет показано ниже.
Инструментарий
Мы выяснили, что можем собирать скетчи. Теперь посмотрим как будет организован сам процесс сборки и отладки. Я обещал показать два способа. У каждого из них есть свои плюсы и минусы. Сделаем их краткий обзор.
Способ 1. Создаём отладочный файл, загружаем его в Proteus, отлаживаем там же.

Достоинства:
— относительная простота отладки (с подключением монитора последовательного порта нужно будет только помучиться);
— доступ во внешний мир через последовательный порт;
— построение графиков (доступны виртуальные измерительные приборы);
— возможность моделировать схему в режиме реального времени;
— в отдельных окнах доступны регистры мк, области памяти, глобальные переменные и исходный код, конечно, в том числе его ассемблерный вариант.
Недостатки:
— платность Proteus;
— ограниченный набор периферии;
— сложные модели не могу учитывать всех особенностей оригинальных компонентов.
Способ 2. Создаём отладочный файл, загружаем его в AVR Studio 4, отлаживаем, используя специальный плагин Proteus VSM Viewer для AVR Studio 4.
По достоинствам и недостаткам почти то же, что и способе 1. Можно добавить, что AVR Studio показывает подробное дерево всех регистров моделируемого мк, вплоть до битов, что очень удобно. Из минусов стоит отметить, что отладка оптимизированного кода имеет свои особенности и не так просто понять как заставить отладчик останавливаться в нужных местах.
Способ 3. Создаём отладочный файл, загружаем его в AVR Studio 4, отлаживаем, используя программный эмулятор JTAG ICE mkII и специальный адаптер (HappyJTAG2).
Достоинства:
— это настоящая отладка в реальном «железе» с использованием JTAG ICE mkII отладчика (поддержка мк вплоть до ATmega2560);
— HappyJTAG 2.45 работает на Windows 7 x64, нужно только пропустить одно окошко, где просят всё-таки купить драйвера.
Недостатки:
— замечена нестабильная работа HappyJTAG2 с небольшими по объёму исходниками;
— нестабильная работа AVR Studio при выполнении отладочных действий;
— автор HappyJTAG2 давно забросил своё детище (видимо с приходом AVR Studio 5 и Atmel Studio);
— некоторые особенности подключения (COM4 или один из первых 4-х последовательных портов должен быть свободен или отсутствовать, т.к. AVR Studio перебирает COM1-COM4 в поиске отладчика). Именно свободен или отсутствовать, т.к. HappyJTAG2 работает, так скажем, «изнутри».
Как вы видите я показал три способа, но в настоящее время практически у меня заработали только два из них. Первый способ будет описан в этой статье. Второй способ, к сожалению, мне не удалось повторить. Нужно найти «совместимую» комбинацию Proteus и AVR Studio. На картинке использована последняя студия AVR Studio 4.19.730 и Proteus 7.7 SP2. Когда-то давно я использовал этот способ, но при наличии железного отладчика пользоваться им не имеет особого смысла. Третий способ я оставил для второй части. Там нужен будет адаптер и описание его подключения к платам Arduino, поддерживающим отладку по JTAG.
И что же для этой всей кухни нам понадобится? Для начала нужно забыть про убогое Arduino IDE, его можно использовать только для контрольных проверок при сборке скетчей. Далее, нам понадобятся:
Будем считать, что вы знаете как спросить у Google где достать всё это хозяйство. На всякий случай я приведу полезные ссылки в конце статьи. Некоторые комментарии по поводу инструментария.
Как известно, Proteus платный, но это не самое печальное. К сожалению, его библиотеки не на столько близки к реальному миру, как хотелось бы. К примеру, Ethernet shield W5100 вы промоделировать в нём не сможете (по крайней мере в версии 7.x). Поэтому, уважаемые последователи Arduino, идите истинным путём. Только отладка и только в железе спасут ваши души от неправильно поставленных вопросов. Proteus мы будем использовать как инструмент обучения, а в полевых условиях — только JTAG.
Отладка скетчей Arduino (AVR) в Proteus 7.x
Хватит общих слов, теперь конкретики. Есть много вариантов запуска процесса сборки, их все не распишешь, поэтому я остановлюсь на конкретно одном и постараюсь описать его понятно. Увидев общую схему, вы сможете применить её на свой набор средств разработки. Для удобства я разобью описание всего процесса по шагам, некоторые можно будет пропускать. Надеюсь, что даже самые неопытные пользователи Arduino поймут о чём речь.
Шаг 1. Скачиваем и устанавливаем среду разработки Arduino. Для определённости допустим, что она будет из серии 1.6.x. Здесь сразу сделаю несколько замечаний. Вообще, от Arduino нам нужны только библиотеки. Если не считать всего остального, то сама идея упрощённого вида программы очень даже хороша (если сравнить C# и C++ или, не дай боже, C++/CLI, то это небо и земля). Отсутствие же нормальных отладочных средств привело, прямо скажем, к безграмотному программированию. Вместо того, чтобы осознанно превращать задуманный алгоритм в программный код, пользователи Arduino вынуждены делать комбинации из магических заклинаний, выцеживать инфу через Serial.print() и только некоторые пытаются статически прочитать исходники библиотек. Тяжко на это всё смотреть.
Я отвлёкся, а вы, наверное, успели поставить среду по стандартным путям. Желательно, чтобы папка Arduino находилась в корне раздела (C:\Arduino). Это связано с путями в makefile, которые не любят пробелы в «Program Files». Мы позже будем настраивать пути и для тех, у кого папка уже в «Program Files» придётся сделать одну сложную для пользователей Windows вещь — junction point на папку. Возможно, пробел можно экранировать, но я этого не пробовал.
Для определённости, допустим, что путь к среде такой: C:\Program Files\Arduino.
Шаг 2. Скачиваем и распаковываем Arduino-Makefile. Содержимое папки Arduino-Makefile-master распаковать в C:\Arduino-Makefile. Хочу сразу отметить, что внутри есть файл README.md, который лучше посмотреть на github’е, где много чего описано. Также следует взять на заметку файл arduino-mk-vars.md, который содержит описание используемых в пользовательском (проектном) Makefile переменных.
Для работы утилиты make нужен комплект gnu bin utils, который входил в состав WinAVR в своё время. Я не знаю есть ли официальный сайт сборки этих самых утилит под Windows, но можно поступить следующим образом. Вам нужно будет скачать старый добрый WinAVR последней версии и вытащить из него папку utils, где находятся командные утилиты. Можно установить, скопировать папку и деинсталлировать WinAVR (потому что в его комплект входит старый компилятор avr-gcc, который нам не нужен).
Далее, к примеру, создать папку c:\avr-gcc и скопировать utils в неё. После этого добавить в переменную PATH (через свойства Компьютера) путь C:\avr-gcc\utils\bin:
set PATH=C:\avr-gcc\utils\bin;%PATH%
Путь должен быть одним из первых в поиске. Не забывайте про это изменение, т.к. оно может повлиять на работу других программ, если вы используете другие подобные среды разработки.
Шаг 3. Сами знаете где берёте/покупаете Proteus [7.2 — 7.8]. Почему именно этой серии и такой интервал версий? Потому что я их пробовал и вроде бы на несложных проектах они вполне неплохи. Версии больше 7.8 не могли подгрузить объектный файл одного моего проекта в IAR, а ниже я не пробовал. Восьмёрка просто глючная пока, может быть потом кто-то напишет что-то и про неё. Здесь мы с вами возьмём конкретно Proteus 7.8 SP2.
Шаг 4. Используя статью, создаём junction point на папку с установленной средой Arduino, т.е. C:\Arduino должна ссылаться на C:\Program Files\Arduino. Это нужно, чтобы не мудрить с поддержкой пробелов в makefile’ах. Т.о., не копируя папку с Arduino, мы получили её копию в нужном нам месте. Кто пользуется Far’ом может использовать комбинацию Alt+F6 на папке.
Пишем пример программы для тестирования сборки из среды Arduino, назовём её Example1 и сохраним в папке скетчей:
void setup()
<
DDRD |= ( 1
Компилируем и проверяем, что сборка проходит. У меня в Arduino 1.6.7 компоновщик объектных файлов (ld.exe) вылетел с ошибкой, я заменил его на другой (можно, к примеру, из этой сборки).
Шаг 5. Копируем файл C:\Arduino-Makefile\examples\WebServer\Makefile в папку с нашим скетчем: C:\Arduino-Makefile\examples\Example1. Исправляем его содержимое следующим образом:
# Arduino Make file. Refer to https://github.com/sudar/Arduino-Makefile
# Suppress printing of Arduino-Makefile configuration.
#ARDUINO_QUIET = 1
# Device type as listed in `boards.txt` or `make show_boards`.
BOARD_TAG = mega
# Microcontroller model.
# Usually can be auto-detected as `build.mcu` from `boards.txt`
MCU = atmega2560
#CPU speed in Hz
#Usually can be auto-detected as `build.f_cpu` from `boards.txt`, except in
#some 1.5+ cores like attiny where there is a clock submenu.
#F_CPU = 16000000L
# What name you would like for generated target files.
# Defaults to the name of your current working directory, but with underscores (_) instead of spaces.
#TARGET = project
# Baudrate of the serial monitor.
# Defaults to `9600` if it can’t find it in the sketch `Serial.begin()`
MONITOR_BAUDRATE = 9600
Вставляем вначале нашего исходника строчку, подключающую явно Arduino.h (это делать необязательно, если есть зависимости от библиотек, указываемые в переменной ARDUINO_LIBS):
void setup()
<
DDRD |= ( 1
Не забываем сохранить исходник и Makefile. Далее, находясь в папке Example1, вводим команду make (при помощи консоли или в Far’е, или другим удобным способом), должна появиться большая портянка, похожая на ту, что выводится в Arduino IDE при включении вывода полной информации о процессе сборки. Это если всё было сделано правильно, если же что-то не получилось, то попытайтесь сначала самостоятельно понять что не так, а потом уж пишите комменты к статье.
Поскольку мы в Makefile закомментировали строку ARDUINO_QUIET = 1, то перед информацией о сборке идёт шапка со значениями переменных самого Makefile. Часть из них задана, а другие вычисляются по ходу выполнения. Это помогает находить ошибки при правке Makefile проекта.
Будем считать, что всё прошло успешно, тогда у вас должна появиться папочка build-mega, в котором наш долгожданный Example1.elf — этот тот самый файл, ради которого всё действо затевалось. Этим файлом мы «прошьём мозги» виртуальному мк в Proteus и заживём… с ещё одной степенью свободы.
Шаг 6. Вернёмся к Proteus. Создаём новый проект (dsn-файл) в папке с исходником. Достанем из недр библиотек компонент — микроконтроллер ATmega2560 и вставим его куда он поместится, уж здоровый больно. Заполните свойства компонента по картинке. Устанавливать COMPIM пока не обязательно, он понадобиться для работы с монитором.
Затем входим в режим отладки Debug\Start/Restart Debugging. Получите картинку, похожую на такую.
Ну, а дальше, всё зависит от полёта вашей фантазии. В окошке исходников будет доступен не только Example1.ino, но и другие зависимые исходники. Можно раскрыть ассемблерный код, регистры процессора, память и что-то там вроде ещё. Читайте доку на Proteus.
Шаг 7. Нужно настроить монитор. Писать лень, надеюсь сделаете это уже самостоятельно. Смысл, вкратце, такой. Создаёте два виртуальных последовательных порта, соединённых нуль-модемом (лучше с номерами больше COM4). Один прописываете в компоненте COMPIM Proteus, а второй в терминальной программе (PuTTY). Не забудьте поправить скорость и кодировку вывода в терминальной программе, по идее она должна совпадать с кодировкой исходных файлов, если захотите делать вывод в монитор по-русски.
Шаг 8. Если хотите использовать avr gcc 4.9.2, то нужно положить содержимое архива в корень диска и исправить путь в переменной AVR_TOOLS_DIR. Только там у меня не заработал avr-size, кажется. Можно поменять его на тот, что идёт в комплекте WinAVR (или Arduino).
Кстати, чтобы размер выводился в нормальном виде нужно добавить опцию в вызов avr-size (файл Arduino.mk):